We are delighted to announce our Automation Prototype Teams! These 8 teams will receive funding from SWCTN over the next 6 months to produce their prototypes; each one will then be exhibited in our summer Showcase.
Read all about the people and prototypes below:
SOFT ROBOTIC CITIES: playable places for urban spaces
We live in a time of an increasingly uncertain environment. Our public spaces need to adapt to this whilst also staying public owned, inclusive and welcoming. Little Lost Robot are exploring the way automation can aid this by using soft robotics to create malleable and versatile street furniture. They will use organic design as a basis to create benches that can give shade, fold and unfold, collect rainwater and host vertical gardens, providing a home for O2 producing plant life.
Little Lost Robot are pioneering structures powered by soft actuators, but consisting of strong wooden or metal substrate. This allows the best of both worlds as it combines the safety and human focused elements of soft robotics with strength and durability. Soft robotics is ideal for this because it is tough, safe for public use, hard to break, malleable, cheap, easy to construct, low power and easy to run off a 12volt system, so can be solar powered. The solar power system could provide USB plug-ins, allowing people to charge phones and work outdoors in the community. The team are looking at flexible voltaic cells, embedding solar technology into the materials. They aim to construct an experiential prototype that can be easily replicated by mechanical process i.e. laser cut or CNC, so that it can become a kit off-the-shelf, bolting together parts that can be put together in a range of ways to suit the environment in which it is needed.
About the Team
Little Lost Robot is a new CIC founded by Artists Ruby Jennings and Joseph Wilk. Coming from contrasting artistic backgrounds their skills are wide ranging – from structural set design to creative coding. They use technology to create a vision of the future that is non-slick, human centric and gloriously humane in all its messy domestic parts.

___________________________________________
XplorEDEN
Data Duopoly are a female-founded start-up, on a mission to revolutionise the visitor experience in any venue worldwide. They are creating an innovative new platform to allow venues to better understand customer behaviour, optimise visitor distribution on-site and increase on-site revenue.
Data Duopoly uniquely create win-win situations for both the venue and visitor, by facilitating personalised discounts to visitors and delivering powerful location data insights for venues.
With a strong co-founding team – Tanuvi Ethunandan, a Chartered Accountant, and Erin Morris, an award-winning Film Director – Data Duopoly have the skills to bring this to life. Data Duopoly has already gained traction, by piloting their unique technology with the Eden Project (a top 40 largest visitor attraction in the UK), where it was demonstrated that the platform can shift visitor flow away from less busy areas via targeted incentives.
Data Duopoly will be working on automating their existing MVP, the Xplor-IT product range, to integrate AI elements and improve accessibility for less mobile visitors. The prototype will showcase advanced routing capabilities, to enable visitors to enjoy a seamless digital experience to complement their day out.
About the Team
At Data Duopoly, we believe in our mission to revolutionise the visitor experience in any venue. We hate queues, and love spending time exploring new places without being interrupted with bottlenecks. Therefore, we are pooling our talents to solve this issue.
Tanuvi, as a Chartered Accountant, having worked at EY for three years, takes the lead on Data Duopoly’s financial and business strategy. Having studied Economics at Cambridge, she understands the data analysis requirements for venues, which Data Duopoly provide via their Analytics Dashboard. Erin is an award-winning Film Director, having successfully brought a creative vision to life, and winning the Miami Jewish Film Festival in 2018. She is responsible for product development and the company’s unique illustrative style.
___________________________________________
AIM (Agroecological Information Model)
AIM is a prototype intelligent software tool for automating the design and ongoing management of human-scale agroe-cological food systems.
Agroecological systems (permaculture, forest gardening and other types of perennial horticulture) utilise plant and insect polycultures to generate biodiversity and soil fertility alongside the production of human food. Agroecology suits the creation of ‘edible urban landscapes’ and ‘food forests’. In conjunction with other forms of urban growing, edible urban landscaping can reduce food miles and a city’s overall carbon footprint as well as improve urban food sovereignty.
AIM will use bespoke algorithms and machine learning to automatically design complex plant polycultures to match local conditions and local needs, allowing increased urban food production in existing green and brownfield sites with minimal inputs of water, fertiliser, herbicides and pesticides, and human labour.
AIM will use a site-specific predictive growth model to provide automated horticultural decision-support allowing local communities to manage the edible urban landscape themselves. AIM will encourage communities to participate in food growing no matter how inexperienced they are, unlocking associated well-being benefits, generating community activities, and providing opportunities for education.
AIM will allow city authorities to implement urban food production on a large scale, and allow urban planners and developers to include community managed edible urban landscaping in their design offer for the benefit of human and non-human communities alike.
About the Team
Paul Chaney is a contemporary artist exploring post-collapse food systems using digital technology and public participation.
Adam Russell is a software developer and AI specialist focusing on creative improvisation between machine and living systems.
Dr Andrew Omerod is an economic botanist interested in novel food crop supply chains, community development and diversity in farming systems.
___________________________________________
AIR GIANTS
Air Giants is a project which brings large-scale soft robotics to life. Whether with towering tortoises or pneumatics newts, this project aims to bring a sense of joy and wonder to large audiences.
The team will create huge, interactive and expressive creatures, using inflatable technologies to create wiggling, squishing and other creepy-crawly contortions not usually associated with robotics.
The project makes these novel movements possible by applying robotic software approaches to make inflatable systems expressive and controllable. Giving the creatures some autonomous behaviour allows a level of control and expression far beyond the scope of a single operator working with traditional controls.
Air Giants have potential for deployment as part of installations, street performance and community events as well as at stadiums shows and international festivals.
About the Team
Emma Powell is an artist with experience designing for robotics projects. Richard Sewell and Robert Nixdorf are roboticists who have worked on projects of all scales. Producer Jazlyn Pinckney will join the team to lead user-testing, and Andrew Bachelor will provide modelling and analytical support.

___________________________________________
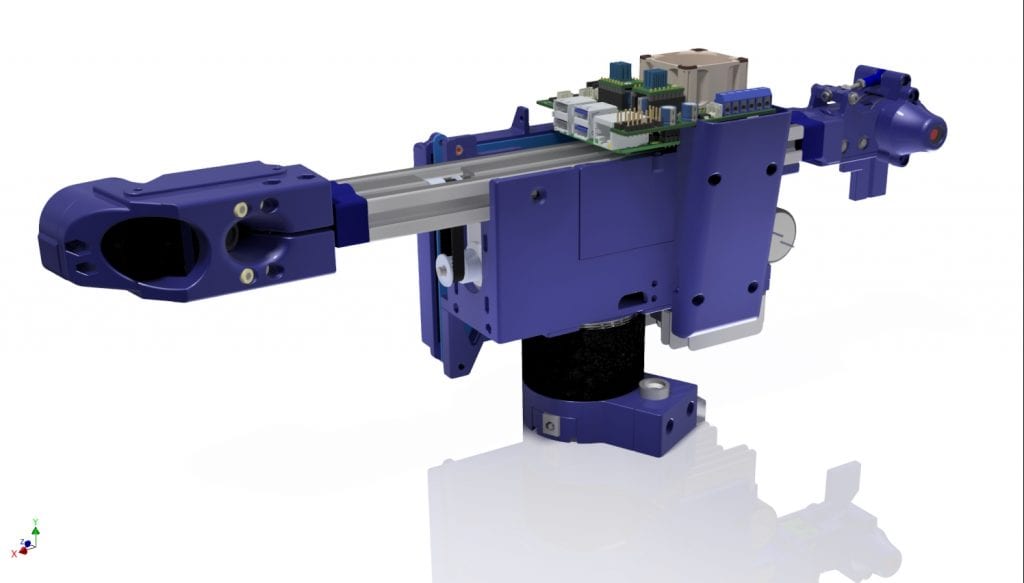
THE ENVIRONMENT SCANNER
The environment scanner is a device which takes thousands of measurements – using a line generator and a number of cameras – and then stitches all of the measurements together to create a drawing or model, which can then be used in virtually every CAD system.
The idea of scanning for measurements is nothing particularly new, but the existing tools are either accurate and incredibly expensive (upwards of £16,000), or cheap and inaccurate. By sacrificing speed but not accuracy, this team aim to bring cost effective environment scanning to the market, at a price point that opens it up to many more users than ever before.
In the same way that the RepRap project aimed to bring 3D printing to a mainstream audience, the team aim to bring laser scanning to many users who would not previously have been able to have access to such a technology. And, like the RepRap project, the environment scanner will be open source, to allow users to mould the technology to their own particular uses. The team are using non-proprietary components where possible, to keep the costs down, and make the unit more affordable, both for initial purchase, and should the unit ever become damaged in use. This prototype grant allows the team to develop the parts that have to be proprietary, to manufacturing level, so that they can expedite its route to market.
About the Team
The team is made up of three companies, all coming together for this project:
Beech Design, who are running the project, a specialist computer aided design company.
Yeti Tool, a CNC developer and manufacturer, who will be manufacturing the product.
Reprap Ltd, a R&D team, specialising in 3D printing.
___________________________________________
WEATHER REPORT
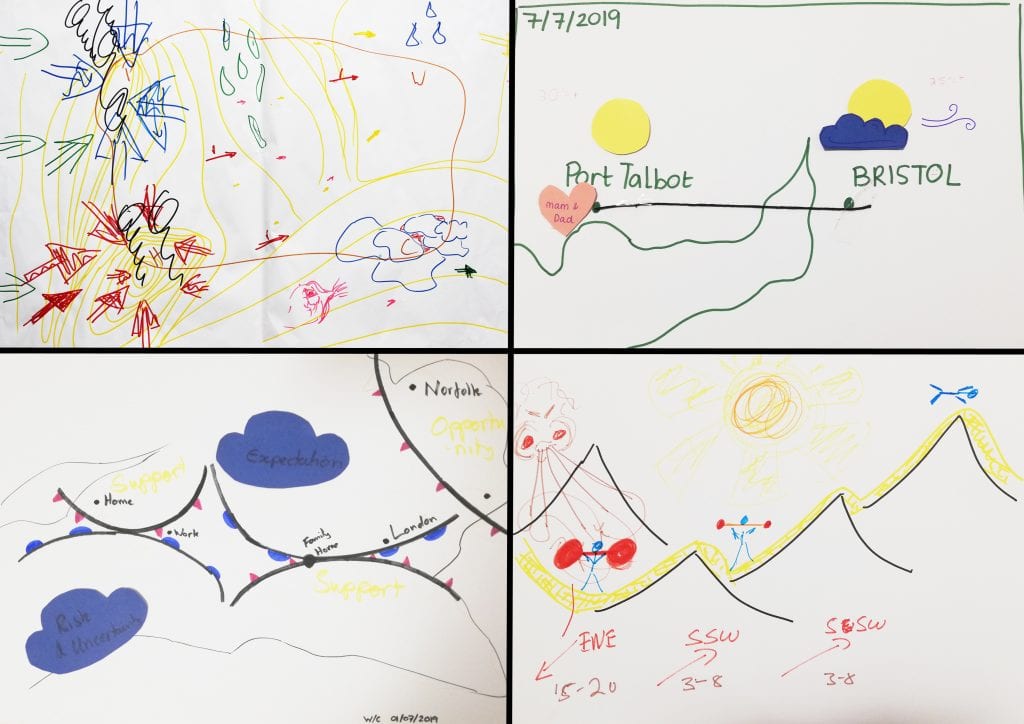
Weather Report will be a physical and digital tool co-designed with men aged 35-55, to help express, monitor and track inner weather as a visual metaphor for mental health and wellbeing. Weather Report will use machine learning to reveal patterns over weeks, months and years that humans find harder to see, especially in times of distress.
Older men are the hardest group to target, and the least likely to access mental health services, apps and support. Weather Report aims to help men aged 35-55 to communicate their emotions and moods so they can reflect more easily, make changes earlier and find a way out of crisis if need be.
One participant created a paper weather report during the initial research and explained: “Over the last couple of months there has been red lightning and thunderstorms, rain, it’s felt like I’m on the edge of a massive gap between two sharp rocks, but currently I can see the light between the clouds shining through.” Further workshops will work with men from Second Step’s Hope Project to explore this idea further.
Although the tool will be co-designed with this particular group, there is no reason that it can’t be used by other groups, e.g. women, younger men – anyone that wants to track their mental health in a visual and tactile way.
About the Team
Studio Meineck are an award winning social design studio run by Chloe Meineck. Working in collaboration with artist and mental health campaigner Aidan Moesby, and co-designed with men through Second Step’s Hope Project. With Tom Metcalfe designing UX and Creative Technologists Rachel Smith and Ellie Foreman building the prototype.
___________________________________________
LOOKING FOR THE CLOUD
The prototype Looking for the Cloud will explore sustainability and diversity in our current and future relationships with new technologies – particularly automation and machine learning. Looking for the Cloud will be delivered in collaboration with The Eden Project and manifest as a prototype book, augmented with a proof-of-concept chatbot. The aim of the project will be to raise awareness and enable conversation around the environmental impact of Cloud computing platforms powering advances in machine learning. This prototype will be the first test project of the Re+ Collective – a new female-led collective supporting women to experiment and work with creative technology.
About the Team
The Re+ Collective.
The prototype brings together a diverse and interdisciplinary team, led by independent producer Nema Hart, with researchers and technologists Dr. Birgitte Aga and Coral Manton; Automation Fellows Ellie Foreman and Rachel Smith and experienced producer and founder of Free Ice Cream, Sam Howey Nunn.
___________________________________________
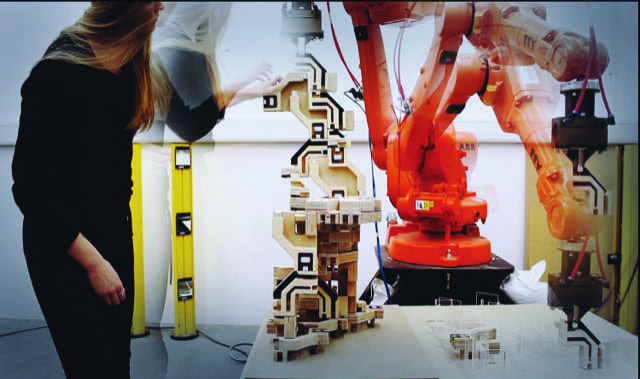
THE COLLABORATIVE CONSTRUCTION PLATFORM: Using AR and Robotics to Decentralise Construction and Empower Workers
The prototype ‘The Collaborative Construction Platform’ is a response to current trends in architecture and construction: the increasing centralisation of production to few large-volume builders, the predicted loss of over 680,000 jobs in the building trades in the UK by 2040 due to increasing adoption of automation in construction, a industry-wide productivity lag since the mid-20th century and an existing skills shortage that is even further affected by construction being avoided by the first generation of digital natives that are entering the workforce in favour of other forms of work that are less dangerous. The prototype will utilise Augmented Reality (AR) and industrial robots to develop a platform-based application for iOS (mobile and tablet) that both enables the preservation of traditional skills and techniques as well as enhance the skills, capacity and quality of design outputs available to workers in the building trades using robotics. AR will be used to encourage experimentation with design possibilities in real-time with live demonstrations, while an industrial robot will be used as a prototyping ‘companion’ capable of capturing, replicating and improving capacities and efficiencies. The prototype aims to create opportunities for new kinds of jobs in construction that are safer, enhance the capacity of tradespeople to contribute to growing technological change in the industry and encourage localised investment in digital tools to decentralise automated production methods in the trades. The application will be developed and co-designed in collaboration with tradespeople from across the SW who, as a cohort, will be diverse in construction experience and digital literacy, creating opportunities for the cohort to develop new skills and expertise in surprising ways.
About the Team
The prototype brings together an interdisciplinary team led by design and technology consultancy Automated Architecture (AUAR) Director Mollie Claypool including: architecture practice Millar Howard Workshop led by Director Tomas Millar, citizen-led arts organisation Knowle West Media Centre led by Head of Arts Melissa Mean and historic conservation and preservation company Ellis & Co led by Director Matthew Ellis. It is part funded by ongoing funding into robotic programming using the Unreal Engine that AUAR has secured from Epic Games in 2019/2020.
Image: INT – Robotic Building Blocks, 2016, Research Cluster 4, Design Computation Lab, The Bartlett School of Architecture, UCL